Tyrezia
Um óculos para deficientes visuais
.png)
COMO FUNCIONA
O Tyrezia é um óculos assistivo desenvolvido para ampliar a percepção espacial de pessoas cegas ou com baixa visão.
Motivação: Pessoas cegas enfrentam obstáculos que não são detectados pela bengala tradicional, e soluções assistivas avançadas tendem a ser caras e inacessíveis. Nosso objetivo é fornecer um dispositivo simples, intuitivo e de baixo custo que aumente a autonomia e a segurança.
Objetivo: Criar um dispositivo vestível com sensores ultrassônicos que forneça feedback sonoro direcional, permitindo que o usuário perceba o ambiente em tempo real sem precisar tocar nos obstáculos.
Contextualização: O Tyrezia utiliza componentes de baixo custo (Arduino, sensores HC-SR04 e buzzers) e foi projetado para ser uma solução prática, intuitiva e acessível para melhorar a autonomia de pessoas cegas ou com baixa visão.
Palavras-chave: Assistência Visual, Ultrassônico, Navegação, Acessibilidade, Baixo Custo.
COMPONENTES UTILIZADOS
Lista dos componentes de hardware essenciais para a montagem do Tyrezia:
- Microcontrolador Arduino UNO: Placa principal para processamento e controle.
- Sensor Ultrassônico HC-SR04 (x2): Usado para medir a distância até os obstáculos (esquerdo e direito).
- Buzzer (x2): Componente de saída sonora que emite o bipe com frequência variável.
- Fios Jumper e Protoboard: Para conexões e montagem temporária do circuito.
- Estrutura de Óculos: Estrutura física para fixar os sensores e buzzers, tornando o dispositivo vestível.
APLICATIVOS E PLATAFORMAS
Ferramentas utilizadas no desenvolvimento do projeto:
- Arduino IDE (v1.8.19): Para escrita e upload do código para o Arduino.
- Figma (Web): Para a criação do logo conceitual e vetorização.
- VS Code (v1.84): Editor de código para o site (HTML/CSS/JS).
- Tinkercad (Web): Para simulação digital do circuito e teste de lógica.
- GitHub (Web): Repositório de código.
- Vercel (Web): Plataforma de deploy para o site.
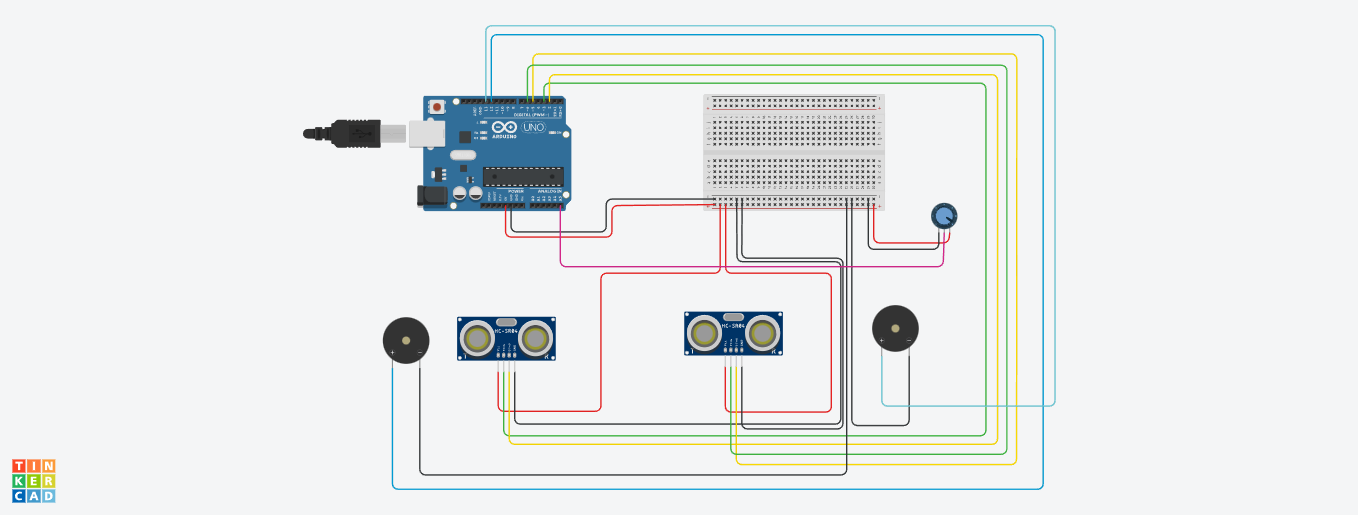
PASSO A PASSO DA MONTAGEM
Passo 1: Conexão do Sensor Ultrassônico Esquerdo
Conecte o VCC (pino de alimentação) do sensor à porta 5V do Arduino e o GND (terra) ao GND do Arduino. O pino Trigger (emissão) deve ser conectado à porta digital 9 e o Echo (recepção) à porta digital 8.
Passo 2: Conexão do Sensor Ultrassônico Direito
Repita a conexão para o segundo sensor. O Trigger deve ser conectado à porta digital 7 e o Echo à porta digital 6.
Passo 3: Conexão dos Buzzers
Conecte o pino positivo de cada Buzzer a uma porta digital PWM do Arduino (ex: porta 11 para o esquerdo e porta 10 para o direito) e o pino negativo ao GND. O uso de portas PWM é crucial para controlar a frequência do som.
Passo 4: Montagem na Estrutura
Fixe os sensores ultrassônicos na parte frontal da armação dos óculos, apontando para frente. Os Buzzers devem ser fixados nas hastes laterais, próximos aos ouvidos do usuário. O Arduino e a bateria podem ser fixados em uma caixa leve para ser levada no pescoço ou no bolso.
CÓDIGO
Trecho de Código Essencial (Leitura do Sensor):
A função principal para calcular a distância e ajustar o feedback sonoro.
// Função para medir a distância em cm
long medirDistancia(int triggerPin, int echoPin) {
// Limpa o Trigger
digitalWrite(triggerPin, LOW);
delayMicroseconds(2);
// Seta o pino Trigger como HIGH por 10 us
digitalWrite(triggerPin, HIGH);
delayMicroseconds(10);
digitalWrite(triggerPin, LOW);
// Lê o pino Echo, retorna a duração da onda sonora em microsegundos
long duracao = pulseIn(echoPin, HIGH);
// Converte a duração para distância (cm)
// Velocidade do som (340m/s ou 0.034cm/us). Distância = (duração * velocidade) / 2
long distancia = duracao * 0.034 / 2;
return distancia;
}
void loop() {
long distEsq = medirDistancia(TRIGGER_ESQ, ECHO_ESQ);
long distDir = medirDistancia(TRIGGER_DIR, ECHO_DIR);
// Ajusta o som do Buzzer (quanto mais perto, mais rápido/agudo)
if (distEsq < 100) {
int freq = map(distEsq, 0, 100, 2000, 200); // Mapeia 0-100cm para 2000-200Hz
tone(BUZZER_ESQ, freq, 100); // Toca a frequência por 100ms
} else {
noTone(BUZZER_ESQ);
}
// Lógica similar para o lado direito
}
SIMULAÇÃO DO FUNCIONAMENTO
Arraste a bolinha e veja como os sensores respondem com distâncias e beeps, simulando fielmente o comportamento do óculos Tyrezia.
Distância Esquerda: -- cm
Distância Direita: -- cm
PROCESSO DE DESENVOLVIMENTO
DESAFIOS E LIÇÔES
Desafio Central: Ajuste e Sensibilidade da Frequência
O que deu errado?
Inicialmente, a frequência e a cadência do som emitido pelos buzzers eram fixas ou variavam apenas com a distância de forma linear e muito abrupta. Isso resultava em um feedback sonoro pouco informativo e, em distâncias médias, podia ser irritante ou excessivamente rápido/lento, dificultando a interpretação da distância exata pelo usuário. Havia o desafio de encontrar um ponto de equilíbrio onde o som fosse sutil, mas eficaz para a ecolocalização.Como foi resolvido?
Para dar ao usuário a capacidade de personalizar a sensibilidade do feedback sonoro, integramos um Potenciômetro (conectado ao pino analógico A5 no Arduino). O potenciômetro permite ao usuário ajustar a frequência base do som no código, refinando o tom e a sensibilidade de disparo. O código foi ajustado para que o intervalo de silêncio (pausa) entre os "beeps" ainda fosse diretamente proporcional à distância, mas o tom pode ser personalizado, equilibrando clareza e conforto auditivo.
Lições Aprendidas
A principal lição foi a importância de dispositivos de controle ajustáveis em projetos assistivos. Em vez de impor uma única configuração fixa, permitir que o usuário ajuste parâmetros críticos (como a frequência do tom de alerta) melhora a usabilidade, o conforto e a eficácia geral do produto, tornando-o verdadeiramente personalizado.


